I found a paper called “Monolithic 2 DOF fully compliant space pointing mechanism” while looking for useful flexure combinations and was wondering how a plastic version of the mechanism would behave. The paper describes a mechanism which rotates around 2 independent axes and could be used for an attitude control thruster or for positioning a space antenna (among other applications). It would only have two input actuators and be made out of one 3D printed titanium part.
The paper is by lead author Ezekial Merriam. Additional authors are: J. E. Jones, S. P. Magleby and Larry Howell. A big thanks to Larry (Professor and Associate Academic Vice President of Mechanical Engineering at BYU) who was kind enough dig up the STL file for this and email it to me. The paper has lots of good details about vibration modes (important for space launches), accuracy, repeatability, stiffness and fatigue life.
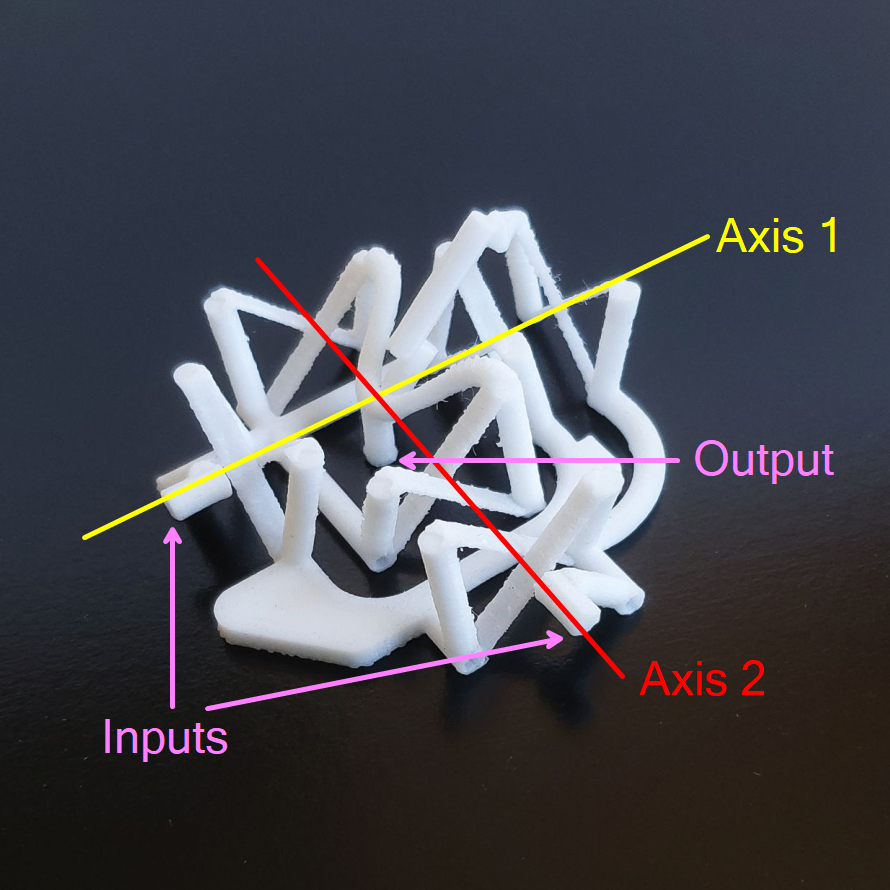
Each axis has 3 flexure pivots (X’s) which allow for rotation about an axis (yellow and red lines). The inputs are the tubes that are in-line with the two axes. The output is the tube that’s perpendicular to both axes.
If you’re on the lookout for these flexure pivots you’ll see them in lots of space hardware like on the James Webb’s filter wheel (from Launch Pad Astronomy – How James Webb’s Instruments Work – and What They’ll Show Us!)

Coincidentally, a couple months after I contacted Larry about this paper, Derek from Veritasium made a popular video featuring both Larry and this mechanism! Check out “Why Machines That Bend Are Better” below. The STL model has since been made available on Thingiverse, possibly in response to Veritasium’s video (Thingiverse link).
A couple more videos showing the mechanism in action.